Fire Fighting Robot (2019)
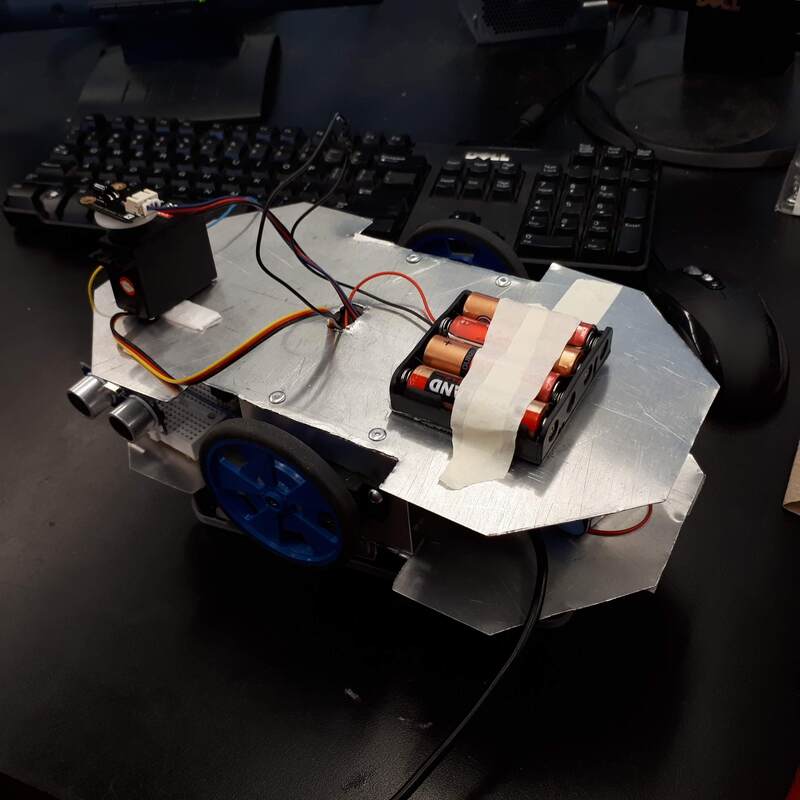
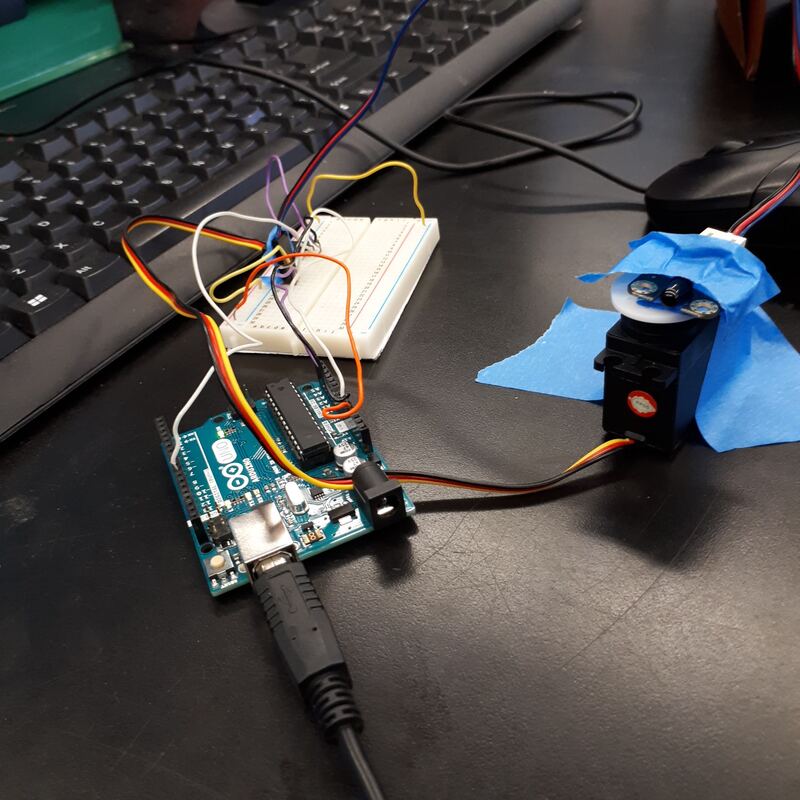
In grade 11, our culminating project was to create a firefighting robot. The goal of the project was to design and build a robot that would autonomously move through a maze and extinguish a small fire at the end. The project used an Arduino to control the motion based on information provided from sensors. Ultrasonic sensors were used to detect the walls of the maze to avoid collisions, and a flame sensor to detect the fire. Modified servo motors were attached to the wheels allowing the robot to move forward, and a small fan was used to extinguish the flame.
If we were to work on this project again, an improvement we could make is changing the design of the chassis. The chassis was composed of two irregularly shaped hexagonal plates, and the electrical components were placed between them. Since the plates were made of metal, it made the overall robot quite heavy. We could have reduced the amount of material used in the plates to make the overall design lighter.
If we were to work on this project again, an improvement we could make is changing the design of the chassis. The chassis was composed of two irregularly shaped hexagonal plates, and the electrical components were placed between them. Since the plates were made of metal, it made the overall robot quite heavy. We could have reduced the amount of material used in the plates to make the overall design lighter.
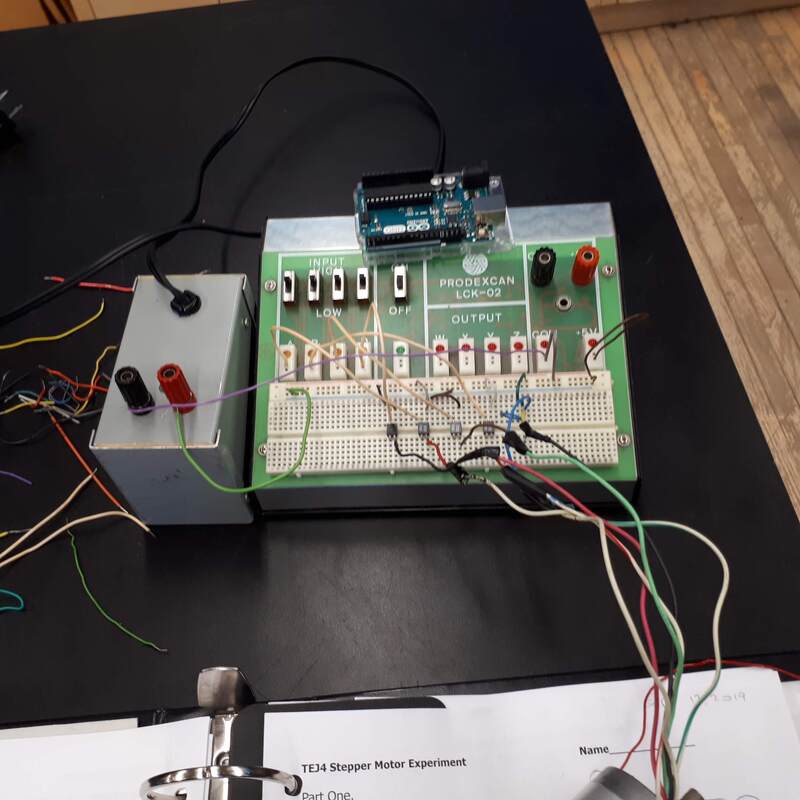
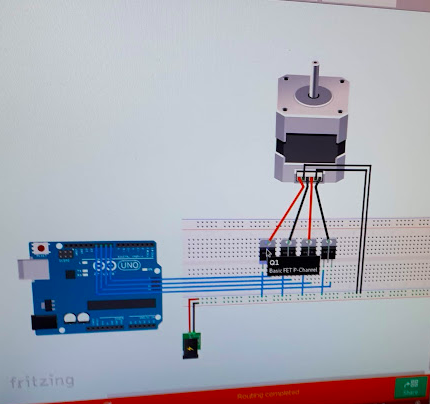
Experiments from Robotics (2020)
Stepper Motors and MOSFETs


Copyright © 2023 Avni Tilva
